We consider the damped, mass-spring system with a sinusoidal external force:
where .
By using the method of undetermined coefficients, one can shown that
where the complementary solution, , is the solution of the corresponding homogeneous equation.
In real-world damped systems, we must have as , and therefore, is called the transient part of the solution. The transient part depends only on the parameters of the system (, , and ) and the initial conditions. The other term of the solution is called the steady-state part or the steady-periodic part of the solution.
The expression
is called the gain factor. Notice that the gain factor depends on the system parameters and the frequency of the external force.
Practical resonance
Let's find the maximum value of .
Upon differentiating, we find that
and if and only if
We use to denote the frequency on the right.
Case 1
If the system is over-damped () or critically damped (), then is imaginary, and we must have the maximum when . In this case, the maximum gain is .
Case 2
If the system is under-damped (), we have the maximum when . In this case, the maximum gain is
and is called the resonance frequency. For under-damped systems, maximum gain occurs when the frequency of the external force is equal to the resonance frequency. Notice that as , the gain increases without bound and ( is the natural frequency of the system).
Example
Solve:
Here is the Sage code.
t=var("t")
x=function("x")(t)
de=10*diff(x,t,2)+3*diff(x,t)+49*x==20*cos(4*t)
desolve(de,x,[0,5,0])
The solution is
which can be written in the approximate form
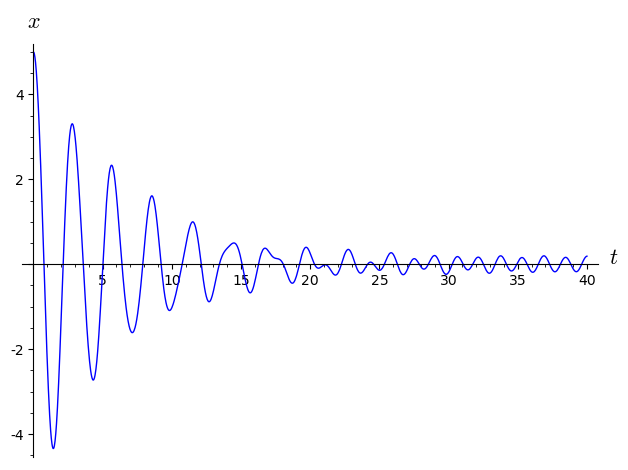
The first term is the transient part. Notice that it decays with time. The second term is the steady-state part. It dominates the solution for large .
The graph of is shown here.
In this example, the resonance frequency is , which is not particularly close to the frequency of the external force (). The maximum gain is rather small.